工业自动化系统中的现场总线技术面临挑战,如何高效解决数据冲突问题?现有传感器和执行机构越来越多地采用CAN总线等通信接口,但其固定的通信数据格式在复杂大型系统中常引发底层数据冲突。设计者必须找到完美的解决方案。
一、问题分析
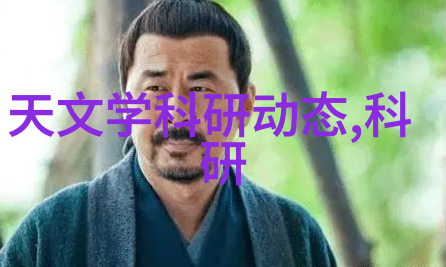
在同一个CAN网络中,每个节点发送的报文ID必须是独一无二的,以防止当两个节点同时上传数据时产生错误。但是,我们经常发现某些CAN接口上的传感器或执行机构,其报文ID固定,没有硬件地址区分。例如,一台电机有三条标准帧功能报文,ID分别为0x0001、0x0002和0x0003。在这个情形下,在同一个CAN网络中使用多个相同类型的电机既要避免ID冲突,又要识别硬件地址,这是一个挑战。

二、解决策略
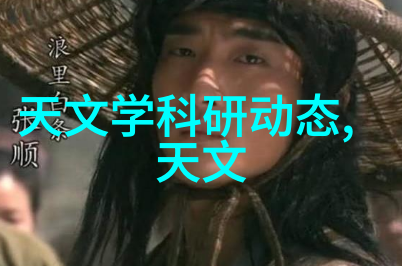
为了克服这一难题,可以在每个设备与总线之间安装致远电子的CAN网桥——CANbridge+。这款设备提供了强大的ID映射功能,将每台设备的功能ID映射为带有地址字段的新ID。这不仅能防止不同设备上传相同报文导致的错误,还可以通过添加地址字段区分不同的设备。我们可以将标准帧中的高8位定义为地址字段,从而通过ID来识别不同设备上行下行报告图如下:
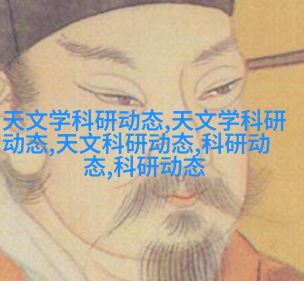
图1:相同_CAN_ID_ 设备组网示例
图2:利用_CAN_bridge_ 实现相同_CAN_ID_ 设备组网

三、配置流程
1.波特率设置:

使用通讯线连接PC机到_CANbridge+_并打开CANCfg软件。
在基本信息选项卡里选择所需波特率,并确保它们与连接到_CANbridge+ 的各个_CAN_ 设备匹配。
图3:配置 CANBridge + 的波特率设置
2.帧映射设置:
点击使能帧映射。
假设_CANbridge+ 的 CAN1 端口连接到某种类型的一号设备,而 CAN2 端口则连接到了整个网络。
添加以下图所示映射关系,将该编号下的所有功能关联至硬件地址上。此类操作应对剩余其他装配于 _CAN_bridge 的各种装置进行处理,以实现具有相似 _can_id 的各种装置共存。
图4:配置 CANBridge + 帧映射设置
声明:本内容转载自相关资料,如涉及版权问题,请及时联系删除(QQ:2737591964),谅解之处望理解!